A Construção do Nosso Robo
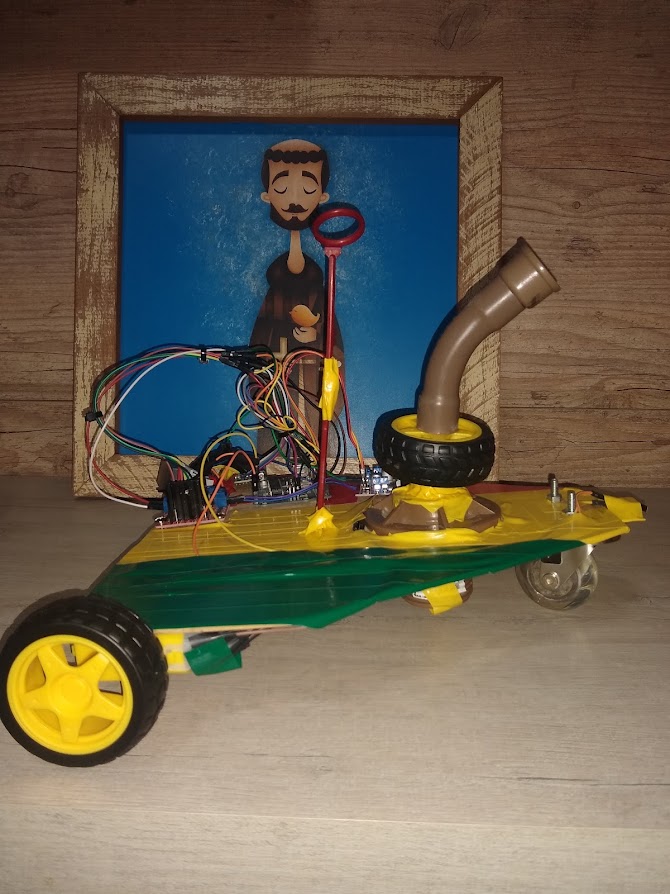
O grande componente desse Robô é o Arduino Uno localizado no canto inferior esquerdo do chassi. Esse Arduino recebe e computa todas as ações que serão executadas pelo robo, todos os outros chips e as outras boarda estão conectados diretamente nele. Partindo para os chips específicos possuímos 2 pontes H, essas servem respectivamente para o controle de energias das rodas e da arma. Temos também o módulo bluetooth, esse que recebe as informações vindas do aplicativo de controle do robo e os manda para o Arduino.
Na parte estrutural temos uma placa de MDF que comporta todos os outros componentes, essa placa é revestida de fitas de 3 cores, verde vermelho e amarelo
Outros componentes que também temos são: Porta-pilhas e interruptor (ambos para controle de energia do robo); Sensor fim de curso (para ativação da arma); Protoboard com LED (Sinalização de funcionamento do robo). É também mencionável que todas as conexões são feitas por jumpers.
Para a movimentação do robo temos 3 partes principais, 2 Rodas motorizadas que fazem a direção do robo e 1 roda boba que ajuda na estabilidade das outras 2 rodas.
O Sistema de Armas
Nosso sistema de armas consiste em uma haste motorizada com uma bola cheia de espinhos na ponta, semelhante a uma maça. A arma possuí 3 componentes principais: A Ponte H, o "cérebro da arma", componente que controla a potência e o movimento da arma; O motor, o componente responsável por gerar o movimento da arma; A haste, basicamente a arma em si, uma haste curvada que possuí uma bola de isopor na ponta, essa bola por sua vez que possuí os espinhos acoplados responsáveis por estourar o balão adversário.
A arma é ativa por um sensor fim de curso que se encontra na ponta do robo e permanece ativada por 15 segundos, após isso é desligada
Imagens